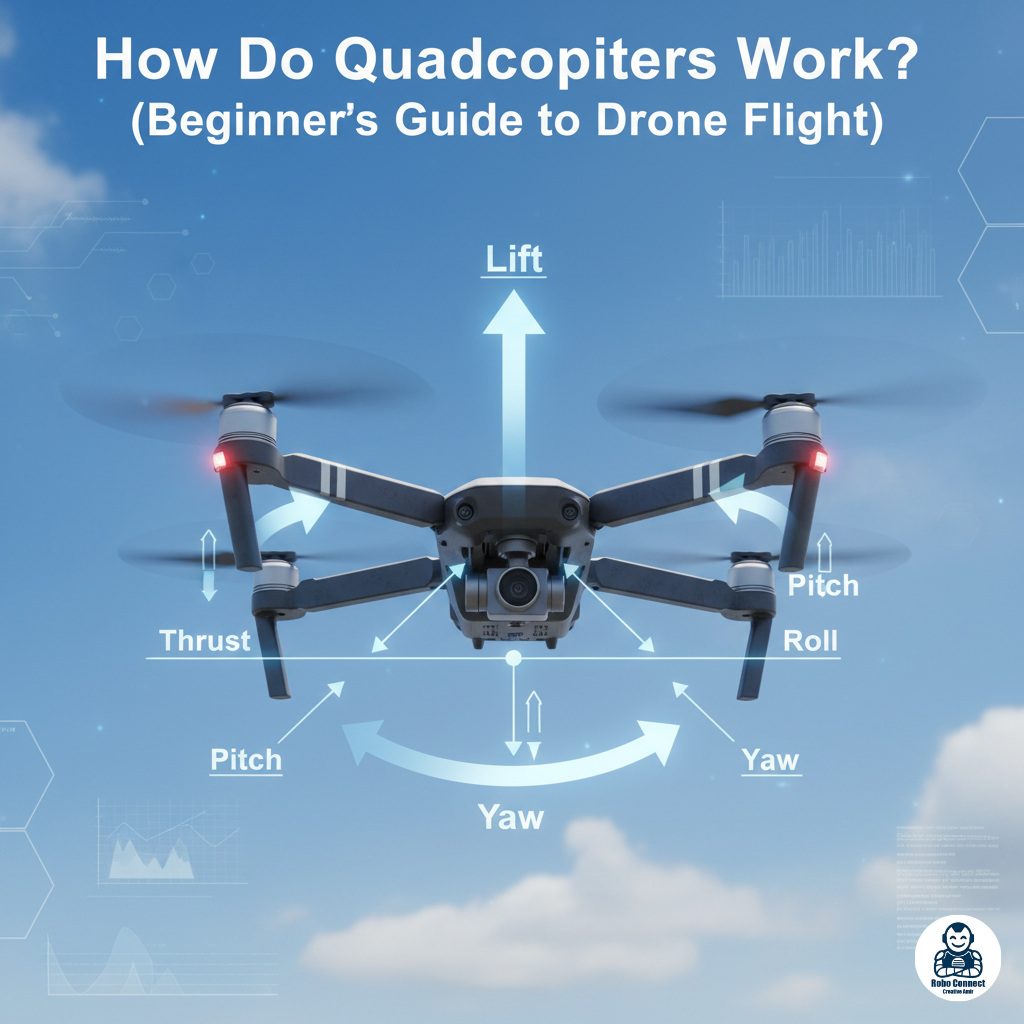
How Do Quadcopters Work? (Beginner’s Guide to Drone Flight)
Introduction
Ever wondered how a small quadcopter (4‑propeller drone) can hover in the air, move forward, rotate, and respond so quickly to your commands?
While it looks magical, it’s really just a clever mix of physics (lift, thrust, torque), electronics (motors, controllers), and software (stabilization algorithms).
In this guide, we’ll break it all down:
- How quadcopters create lift and balance.
- The roles of yaw, pitch, and roll in drone flight.
- How flight controllers & sensors keep them stable.
- Why quadcopters dominate consumer drones.
What is a Quadcopter?
A quadcopter is a type of multi‑rotor drone with four propellers arranged typically in a cross or H‑frame:
- Two rotors spin clockwise (CW).
- Two spin counterclockwise (CCW).
This opposite spin cancels out unwanted torque, keeping the drone stable.
Simple design = stability + precise control = why nearly all hobby & consumer drones use quadcopters.
The Science of Flight (Lift & Thrust)
- Lift → spinning propellers push air downward, creating upward force.
- Thrust → stronger spin = more lift. Reducing spin = less lift.
- By adjusting propeller speeds differently, the drone tilts/moves in any direction.
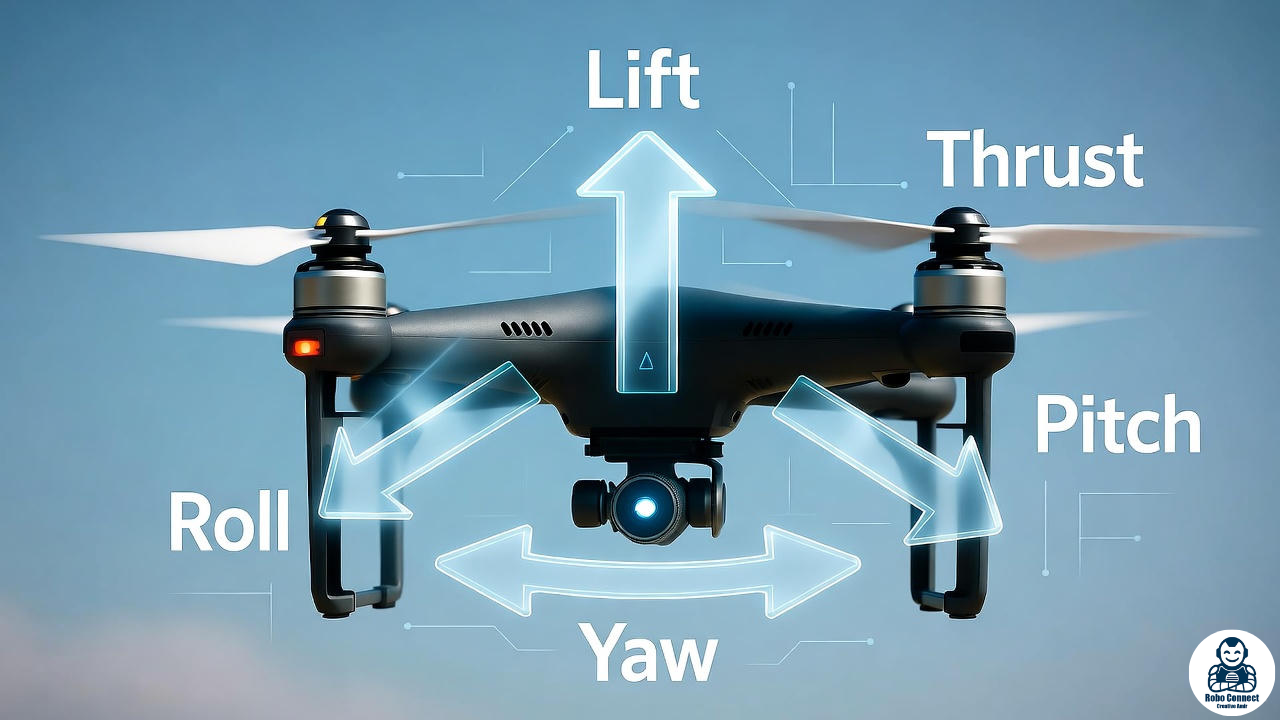
Yaw, Pitch & Roll — The Drone’s 3 Movements
Think of them as the drone’s “axes”:
- Pitch (Forward/Backward Tilt)
- Tilt forward → drone moves forward.
- Tilt backward → drone moves backward.
- Roll (Side Tilt)
- Tilt left → drone rolls left.
- Tilt right → rolls right.
- Yaw (Rotation)
- Rotate clockwise or counter‑clockwise → turns the drone without tilting.
How the Motors Control Movement
- Hovering: All 4 motors spin equally → balanced lift.
- Forward (Pitch): Rear motors spin faster than front → drone tilts forward, moves.
- Side (Roll): Left motors spin faster than right → rolls sideways.
- Rotation (Yaw): Adjust opposite pair motor speeds → twisting motion.
This is why quadcopters feel super easy to control — movement just depends on subtle motor speed changes.
Role of Flight Controller & Sensors
Humans can’t precisely control each motor individually. That’s where the flight controller (the drone’s brain ) comes in.
- Flight Controller (FC): Interprets commands from remote.
- Electronic Speed Controllers (ESCs): Adjust motor speeds instantly.
- Sensors (IMU): Built‑in gyroscope + accelerometer keep balance.
- GPS: Optional for position hold & navigation.
All together, these ensure stable flight + automatic corrections → even beginners can fly drones smoothly.
Why Quadcopters Are Popular
- Simple Design → only 4 propellers, affordable.
- Hover Ability → can stay still in the air (perfect for photography).
- High Maneuverability → move in any direction easily.
- Beginner‑Friendly → easier to fly than fixed‑wing planes.
Common Quadcopter Flight Modes
- Manual Mode → Pilot controls all movements (for FPV racing pros).
- Stabilized Mode (Angle Mode) → Drone auto‑stabilizes itself.
- GPS Hold / Altitude Hold → Drone locks position automatically.
- Autonomous Mode → Pre‑programmed flight path.
FAQs
Q1: What keeps a quadcopter stable in windy air?
The flight controller uses gyroscope + accelerometer sensors to adjust motor speeds in real‑time.
Q2: Why 4 motors? Can’t it fly with 2?
Two motors can’t balance pitch/roll/yaw effectively. 4 motors are the simplest balanced design (hence “quad” copter).
Q3: How long can quadcopters fly?
- Toy/hobby → 7–15 minutes.
- Mid‑range camera drones (DJI Mini) → ~30 min.
- Industrial quadcopters → 1 hr (depends on battery & payload).
Conclusion
Quadcopters may look simple, but they’re powered by a clever blend of aerodynamics, motor control, and electronics.
- 4 propellers → provide lift & stability.
- Yaw, pitch, roll → define its 3D movements.
- Sensors + flight controller → keep it balanced & easy to fly.
Next time you fly a drone, you’ll know the science that keeps it buzzing smoothly in the sky.