High-Speed Robo Soccer Robot – Fully Compatible with RoboConnect App
Introduction
Robo soccer is one of the most exciting robotics competitions, blending speed, precision, and intelligent control. In this project, we will build a high-speed Robo Soccer Robot, fully compatible with the RoboConnect Android App, allowing smooth control through Bluetooth. This guide is designed for students, beginners, and competition teams who want a complete, plug-and-play solution to start dominating robo soccer matches.
This tutorial covers everything—components, wiring, programming, setup, and troubleshooting—to help you build your own agile and competition-ready soccer robot.
Robo Soccer Robot – Full Demonstration & Control Using RoboConnect App
Components Required
Below is the complete list of components you need to build your Robo Soccer robot:
Arduino Uno / Arduino Nano
2 × BTS7960 (for higher power)
4 × 37GB 12 Gear motor (400/ 500) RPM
Bluetooth Module (HC-05 / HC-06)
LM 2596 DC – DC Step down module (for input voltage to 5V)
Lithium Polymer Battery (11.1 V – 14.8 V recommended)
Follow these steps to build your Robo Soccer Robot:
Step 1: Assemble the Chassis
Fix the motors onto the base.
Attach the wheels firmly.
Mount the battery in the center for balance.
Place Arduino and motor driver on top.
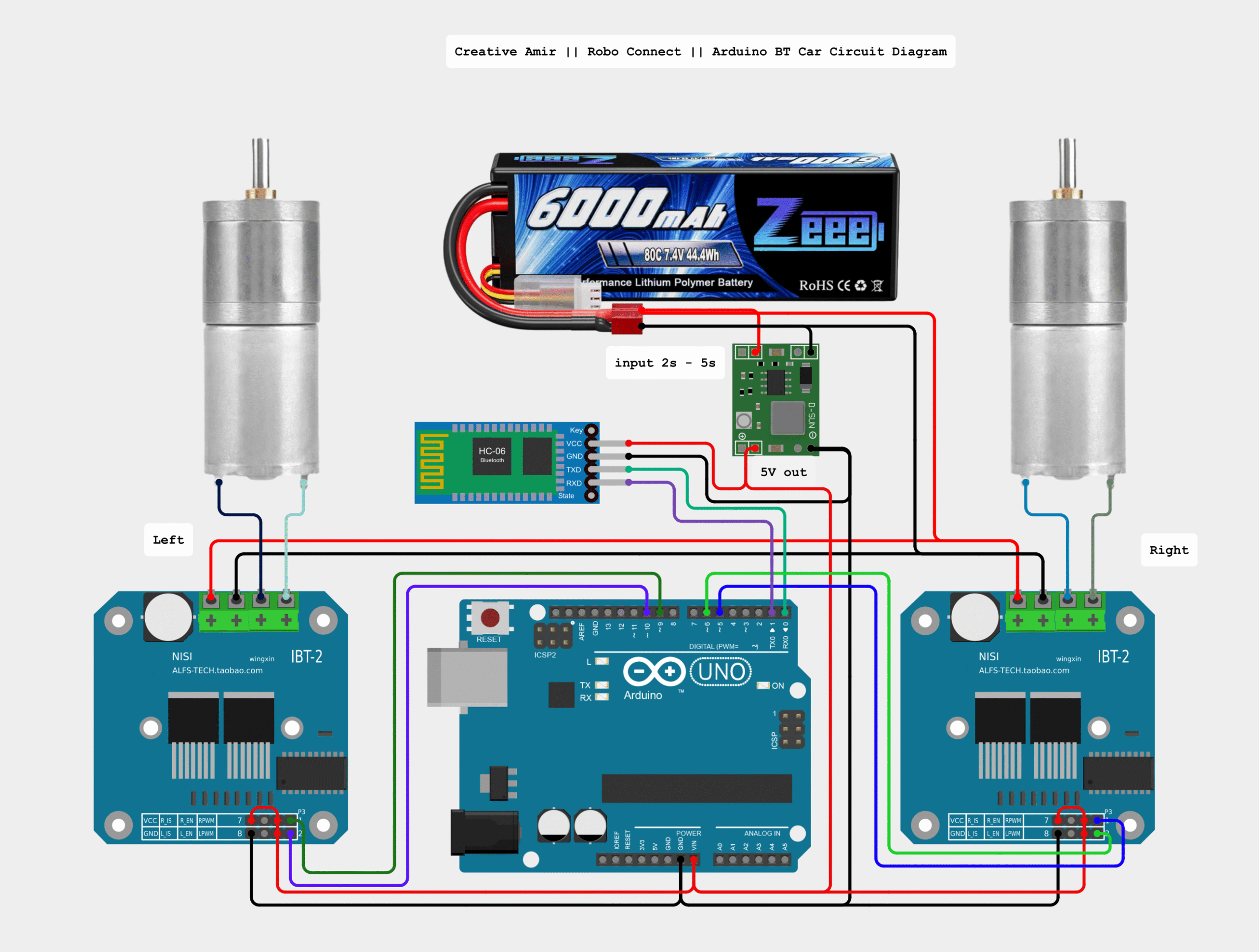
Step 2: Motor Driver Wiring
Connect motor wires to the motor outputs on the driver.
Connect IN1, IN2, IN3, IN4 from motor driver to Arduino digital pins.
Power the driver using the Li-Po battery.
Step 3: Bluetooth Module Setup
Connect HC-05:
VCC → 5V
GND → GND
TX → Arduino RX
RX → Arduino TX
Make sure the baud rate matches 9600 (or the rate required by RoboConnect).
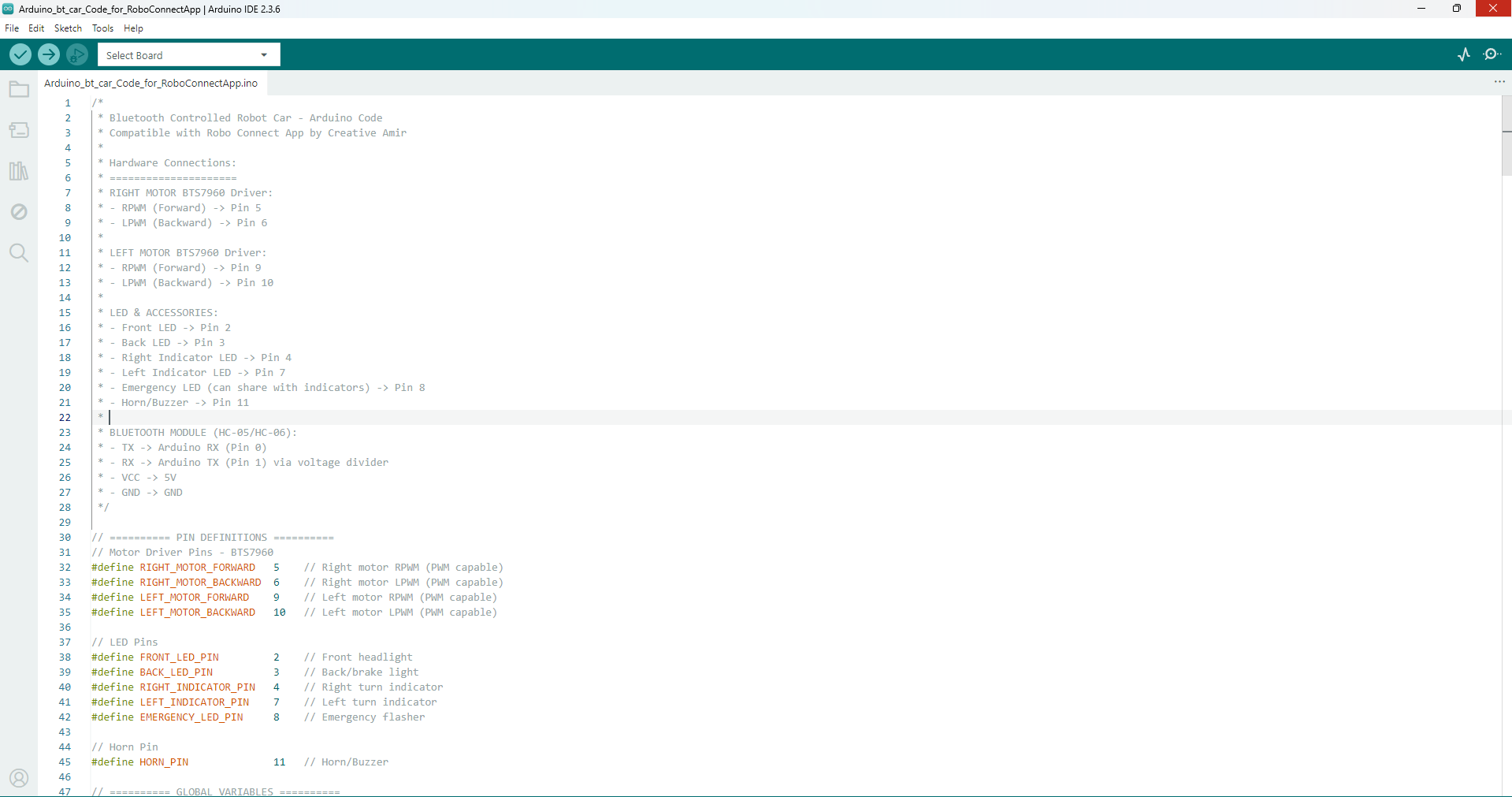
Step 4: Upload Arduino Code
Upload the provided RoboConnect compatible code to your Arduino board.
Step 5: Configure RoboConnect App
Open the app
Pair with your Bluetooth module
Select Robo Soccer mode
Test the joystick controls
Step 6: Final Assembly & Testing
Test forward, backward, left, and right movements.
Make sure the robot moves straight and responds instantly.
How It Works
The RoboConnect app sends directional commands via Bluetooth to the robot. Arduino processes these commands and adjusts the motor speed and direction using the motor driver.
Joystick movement → Bluetooth signal → Arduino → Motor Speed Output → Robot Motion
This allows smooth and real-time control during matches.
Troubleshooting
If your robot is not working properly, check the following:
1. Robot not connecting?
Recheck Bluetooth wiring
Ensure correct pairing PIN (usually 1234 or 0000)
Restart the app
2. Robot not moving straight?
Both motors must be identical
Check wheel alignment
Adjust PWM values in code
3. Motor not running?
Battery might be low
L298N jumper (5V enable) may be missing
Motor driver may be overheated
4. App control delays?
Check Bluetooth module distance
Ensure no obstructions
Reduce background apps on your phone
Project Complexity
Level: Beginner to Intermediate Requires basic soldering, wiring, and Arduino coding knowledge. Perfect for competitions such as:
Robo Soccer
TechFest Robotics
University Tournaments
School/College Robotics Fairs
Conclusion
Building a Robo Soccer Robot with RoboConnect app control is an exciting and rewarding project. This guide provides all the steps you need to assemble, program, and operate your robot successfully. With a little practice, you will be ready to take part in tournaments and dominate the field with speed and precision.
If you want more robotics tutorials, stay connected with Creative Amir.