Sensors for Robotics: Types & How They Work (Ultrasonic, IR, Gyro, Vision, etc.)
Introduction
Robots aren’t really “smart” by default — what makes them intelligent is their ability to sense and react to the environment. This magic happens thanks to sensors.
From the ultrasonic “eyes” that measure distance, to infrared sensors that follow lines, to gyros that keep robots balanced — sensors are the senses of robots.
In this guide, you’ll learn:
- The main types of sensors used in robotics.
- How each of them works.
- Real‑world applications in bot projects.
Why Are Sensors Important in Robotics?
A robot without sensors = a toy that blindly executes commands.
A robot with sensors = a responsive system that adapts in real‑time.
Sensors = human senses for robots:
- Eyes → Vision sensors / cameras.
- Ears → Microphones / sound sensors.
- Balance → Gyroscopes.
- Touch → IR/Proximity sensors.
Common Sensors in Robotics
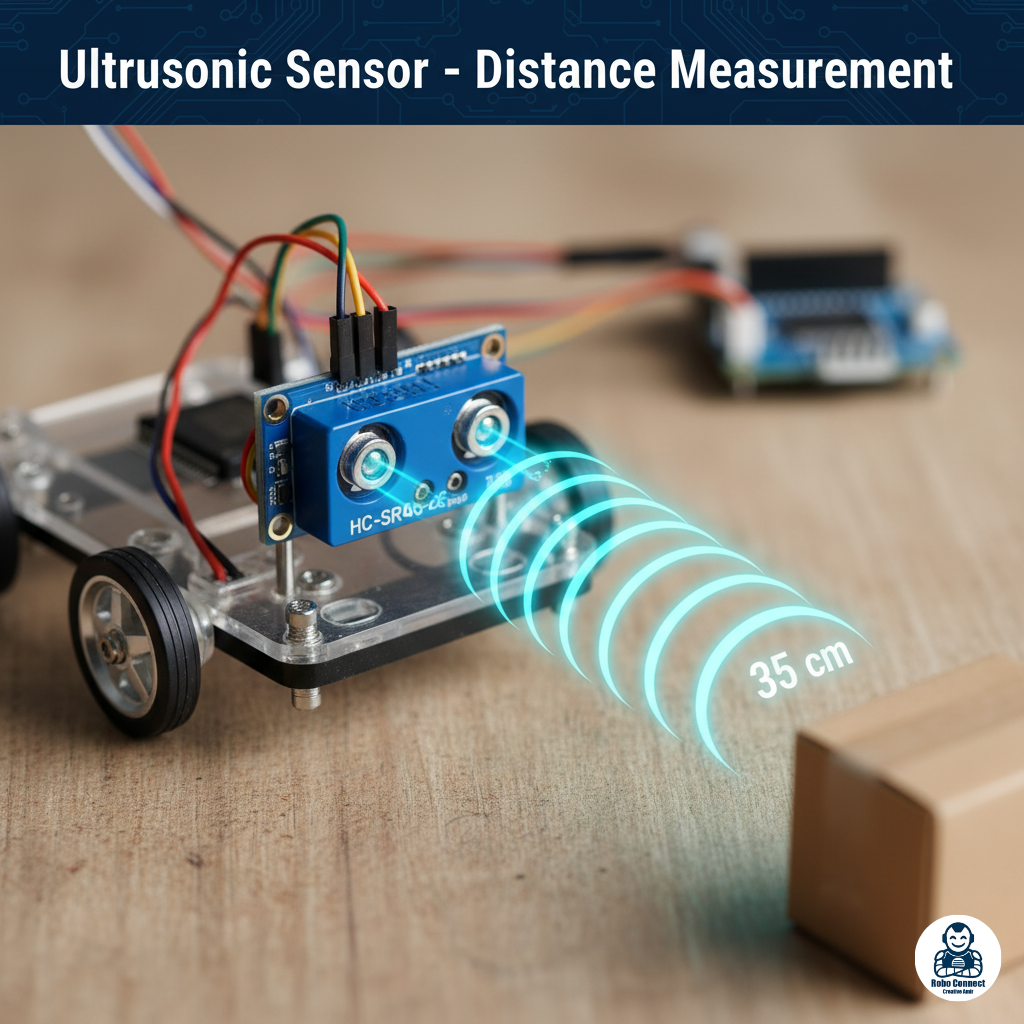
- Ultrasonic Sensor (Distance/Obstacle Detection)
- Works by emitting ultrasonic sound waves and measuring how long echoes take to return.
- Formula: Distance = (Time × Speed of Sound) ÷ 2.
- Example module: HC‑SR04.
Applications:
- Obstacle avoidance robots.
- Parking assistance (cars).
- Distance‑measuring bots.
Arduino Example (Ultrasonic HC‑SR04):
C++
#define TRIG 9
#define ECHO 10
long duration;
int distance;
void setup() {
pinMode(TRIG, OUTPUT);
pinMode(ECHO, INPUT);
Serial.begin(9600);
}
void loop() {
digitalWrite(TRIG, LOW);
delayMicroseconds(2);
digitalWrite(TRIG, HIGH);
delayMicroseconds(10);
digitalWrite(TRIG, LOW);
duration = pulseIn(ECHO, HIGH);
distance= duration * 0.034 / 2;
Serial.print(“Distance: “);
Serial.print(distance);
Serial.println(” cm”);
delay(500);
}
- Infrared (IR) Sensor
- Detects presence/absence of objects or light intensity.
- Types:
- IR Obstacle Sensor: Detects objects nearby.
- IR Line Follower: Detects black/white contrast for line‑tracking robots.
Applications:
- Line‑follower robots (track black path on white surface).
- Proximity sensors in automatic taps.
- IR remotes & receivers.
- Gyroscope / Accelerometer (IMU Sensors)
- Accelerometer: Measures acceleration, tilt.
- Gyroscope: Measures angular velocity (rotation).
- IMU = Inertial Measurement Unit (combo of both).
- Example module: MPU6050.
Applications:
- Balancing robots (self‑balancing bot).
- Drones (pitch, roll, yaw stabilization).
- Wearable robotics (motion sensing).
- Vision / Camera Sensors
- Raspberry Pi Camera / USB webcams give “eyes” to robots.
- Paired with computer vision libraries (OpenCV, TensorFlow Lite).
- Can recognize shapes, faces, objects, traffic lights, etc.
Applications:
- Autonomous cars.
- AI detection bots.
- Security robots (face recognition).
- Touch & Proximity Sensors
- Tactile touch switches: Robot detects when it hits an obstacle.
- Capacitive touch sensors: Detect human touch.
- Proximity sensors: Detect nearby objects without physical contact.
Applications:
- Collision‑avoiding robots.
- Simple bump‑detection bots.
- Touch‑interactive robotic toys.
- Sound / Microphone Sensors
- Detects claps, whistles, or general sound levels.
- Can use audio pattern matching for commands.
Applications:
- Clap‑to‑activate robotic car.
- Voice‑controlled bots (when paired with software processing).
- Temperature, Humidity & Gas Sensors
- DHT11/DHT22: Temp + humidity measurements.
- MQ series gas sensors: Detect CO, LPG, methane, etc.
Applications:
- Fire‑fighting robots.
- Environment‑monitoring bots.
- Safety/security robotics (gas detection).
Sensor Combinations = Smarter Robots
Most real robots use multiple sensors together:
- Line‑follower bot → IR Line Follower + Ultrasonic (for obstacles).
- Drone → IMU (balance) + GPS (location) + Camera (object tracking).
- Smart home robot → Touch sensors + AI vision + Microphone.
The more sensors, the more information, the smarter the robot!
FAQs
Q1: Can Raspberry Pi read sensors directly?
- It handles digital sensors. For analog sensors, you need an ADC chip (like MCP3008).
Q2: Do Arduino sensors work on Raspberry Pi?
Yes — most common sensor modules can be adapted with Python libraries.
Q3: Which sensor should I start with?
- Start with Ultrasonic + IR sensors for obstacle robots.
- Then move to Gyroscope + Camera for advanced robotics.
Conclusion
Robotics sensors are the eyes, ears, and balance system of a robot.
- Ultrasonic → Distance.
- IR → Line following, object detection.
- Gyroscope/Accelerometer → Balance + orientation.
- Camera → Computer Vision + AI.
- Gas/Temp/Humidity → Environmental awareness.
By combining motors/drivers with these sensors, you move from simple machines → to robots that truly interact with the world.
Start simple → Ultrasonic for obstacle sensing, then gradually add vision & AI.